|
FEBRUARY 2024
SAFETY FOR INDUSTRIAL AND COLLABORATIVE ROBOTS
Since their introduction, robots have changed the industrial landscape by providing a means to reach manufacturing potentials otherwise unachievable due to human limitations. Such substantial industrial advancements, however, does not come without substantial risks to humans. Robots are often utilized to handle large and/or hazardous payloads and provide faster processing times. Humans working near robot systems must be protected against direct contact with the robot and its payloads as this may be several hundred pounds and moving at speeds faster than the human reaction speeds. This requirement of providing a safe working environment with robots also includes those activities where there is direct contact with the robot such as during a teach process where the robot parameters are being configured.
The safety standard ANSI/RIA R15.06 was created to provide guidance on implementing safety requirements for Industrial robots and robot systems. Like many current safety standards, ANSI/RIA 15.06 has been harmonized to an international standard to provide better alignment for safety across international borders. In this case, ANSI/RIA R15.06 is harmonized with ISO 10218-1 and ISO 10218-2.
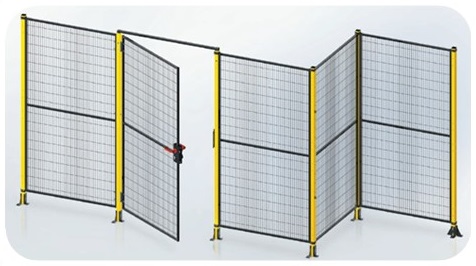
Some basic safety requirements referenced and discussed within ANS/RIA 15.06 and ISO 10218 include the emergency stop function (and its mechanical requirements); three-positioned enabling devices when interacting with the robot; fixed hard guarding (e.g. fencing systems); safety light curtains; safety interlocking (with and without locking); and means to prevent persons from being trapped within a robot cell.
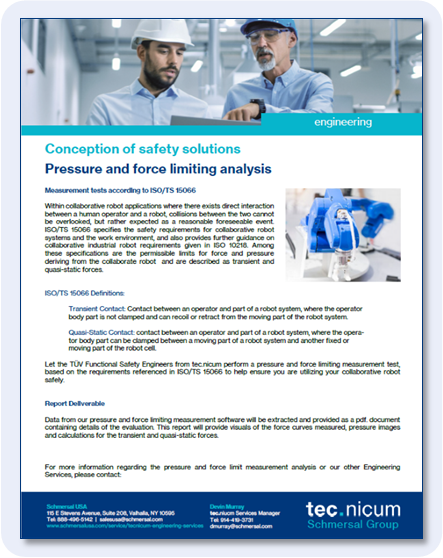
These standards also reference collaborative robot applications, which is where a robot may work in the same working envelop as a human operator. However, the safety requirements for this is covered in more detail within ISO/TS 15066. The main difference here is the robot which can be used, as robots for collaborative use are designed to be inherently safe and are limited to their payload and speed capabilities. Also worth highlighting, is that the use of a collaborative robot does not automatically mean that the collaborate application is safe. Consideration must be given to the environment, auxiliary equipment, end-effectors, materials in use, etc.
Whether it is a traditional industrial robot or a more recently industry accepted Cobot, their general purpose is the same which is to make a specific task easier and more efficient. Both also require the same responsibility of ensuring they are safe to use for personnel working directly with or around them. ANSI/RIA 15.06, ISO 10218 and ISO/TS 15066 provide guidance on safety, and all require a formal safety risk assessment to be completed to ensure a safe working environment.
|